Danske forskere skal hjælpe med design af Marsrobot
Når den europæiske Marsrobot efter planen i 2018 lander på den røde planet, er det ingeniører fra Aarhus Universitet, der står bag værktøjet til modelleringen af robottens køreegenskaber.
Det er det Europæiske Rumagentur, ESA, der har stillet de danske forskere den udfordring at udvikle en ny metode til computermodellering af robotten og dens omgivelser.
- Vi har udviklet et værktøj til at lave meget avancerede computermodeller af selve Marsrobotten og dens omgivelser. Dermed kan vi give en detaljeret beskrivelse af de vigtigste mekaniske, elektroniske og styringsmæssig udfordringer , siger Peter Gorm Larsen fra Aarhus Universitet, som er blandt verdens førende specialister i modelbaseret softwareudvikling.
ESA deltager i en industriel følgegruppe til et større Europæisk forskningsprojekt med fokus på softwaremodellering. Det er her, de har fået øje på den danske ekspertise.
 Skal lede efter spor af liv
Skal lede efter spor af liv
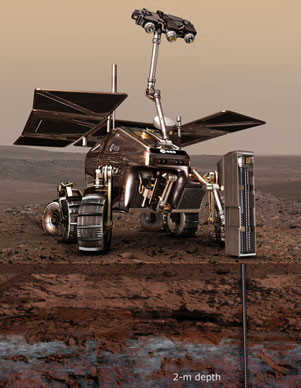
Robotten skal lede efter biologiske og geokemiske spor af liv i planetens overflade og i undergrunden. Den er udstyret med seks hjul, der hver især kan styres selvstændigt og bevæge sig op og ned, så robotten både kan køre og gå.
- Den får nogle meget karakteristiske mekaniske egenskaber med en kompleks interaktion imellem de forskellige maskinelle subsystemer. Man kan sige, at den kommer til at minde lidt om et sofistikeret insekt i dens bevægelsesmønstre. Den skal kunne færdes i forskellige typer af terræn uden at side fast, og den skal kunne bore og opsamle informationer fra undergrunden, forklarer Peter Gorm Larsen.
Kan forudsige robottens adfærd
Det unikke ved forskernes modelleringsværktøj er, at de på én gang kan simulere robottens adfærd og dens omgivelser på Mars. Det gør det muligt at forudsige og forberede en lang række kritiske situationer.
- Man kan lave forskellige matematiske modeller af både virkeligheden på planeten og af robottens intelligens. På den måde kan man for eksempel forudsige, hvordan den vil reagere på forskellige typer terræn. Hvad sker der, hvis den sætter sig fast i ler, møder en stor sten eller falder i et hul? Det kan være meget værdifuldt at teste på forhånd, siger Peter Gorm Larsen.
Computermodel minimerer risiko for fejl
Det er omkostningstungt, at sende en rumsonde til Mars, så det gælder om at være godt forberedt på en række forskellige scenarier af virkeligheden. ESA skal i de kommende år bruge ingeniørernes metode til at videreudvikle og raffinere robottens bevægelser, så den bliver optimalt fejlsikret, siger Peter Gorm Larsen.
- ESA kan bruge vores computermodel til at videreudvikle robottens centrale styringsalgoritme. Med modellen kan de afspille forskellige scenarier, simulere fejlsituationer og samtidig beskrive og verificere robottens adfærd. Det åbner op for en langt højere grad af systematiseret fejlsikring, som er afgørende for, at rummissionen kan lykkes, siger Peter Gorm Larsen.
Robotten er navngivet ExoMars Rover og forventes at være klar til opsending i 2018.
BAGGRUNDSOPLYSNINGER
Projektet, hvor ingeniører fra Aarhus Universitet udvikler værktøjet til modellering af Marsrobotten, hedder DESTECS (Design Support and Tooling for Embedded Control Software).
Det er et treårigt forskningsprojekt med støtte fra EU’s 7. rammeprogram.
Projektet har et samlet budget på 20,6 mio. kroner og gennemføres af Institut for Ingeniørvidenskab ved Aarhus Universitet i samarbejde med universiteter i Storbritannien og Holland, virksomheder fra Holland og Belgien samt en industriel følgegruppe frem til 2013.
Det overordnede formål med projektet er at udvikle metoder, der gør det muligt at bygge en model af virkeligheden parallelt med, at man former en software, der kan forudsige mekanisk adfærd. Metoderne er baseret på en integration af to forskellige computersprogsparadigmer – kontinuert tid og diskret event.
Projektets resultater har en lang række industrielle anvendelsesområder. Udviklingen af modelbaseret software til ESA er et af flere delprojekter fra den industrielle følgegruppe.
Kilde: Aarhus Universitet / Foto: ESA-AOES Medialab